Beginner level popular understanding of motor principles (with analysis of various motor dynamic diagrams)
For many novices, the motor seems to be a complex device full of "technological sense", always feeling that its principles are obscure and difficult to understand, often involving complex physical formulas and professional terminology. In fact, the core principles of all motors can be explained in one sentence, and combined with the structure and dynamic process of common motors, even with zero foundation, it can be easily understood. Today, we will use the simplest language to explain the fundamental principles, common types, and working processes of motors in one go. We will also restore the dynamic logic of various motors to help you thoroughly understand why motors rotate.
1、 The fundamental principle of motors: understanding the core logic in one sentence
Whether it's small motors in toys, large motors in factories, or even drive motors for new energy vehicles, the core principle is only one:Electromagnetism → Magnetic repulsion and attraction → Generating tension/thrust → The motor shaft rotates。
In fact, behind this, only two basic knowledge points from high school need to be used, without rote memorization, understanding is good:
1. An electrified wire will be subjected to force (i.e. Ampere force) in a magnetic field: it can be simply understood as a magnet actively "pushing" or "pulling" the electrified wire;
2. Current can generate a magnetic field (right-hand spiral rule): When a coil is energized, it is like a small magnet with its own N and S poles.
Further disassembly reveals that the essence of a motor is "coil+magnet+constantly changing direction (commutation)". By continuously switching the direction of the magnetic field, the tension and thrust are always directed in the same direction, driving the motor shaft to rotate continuously. And all motors, regardless of size or type, cannot do without two core components:
-Stator: a fixed and immovable part responsible for providing a basic magnetic field, either a permanent magnet or an energized coil;
-Rotor: The rotating part, either a coil or a permanent magnet, whose core function is to be "pushed" or "pulled" by the magnetic field of the stator to rotate.
Once you master this core logic and look at any type of motor, you can quickly grasp its working essence. Below, we will break down the six most common types of motors in daily life, and combine them with dynamic processes to understand their differences and applications step by step.
2、 6 common types of motors: popular principles+dynamic restoration+application scenarios
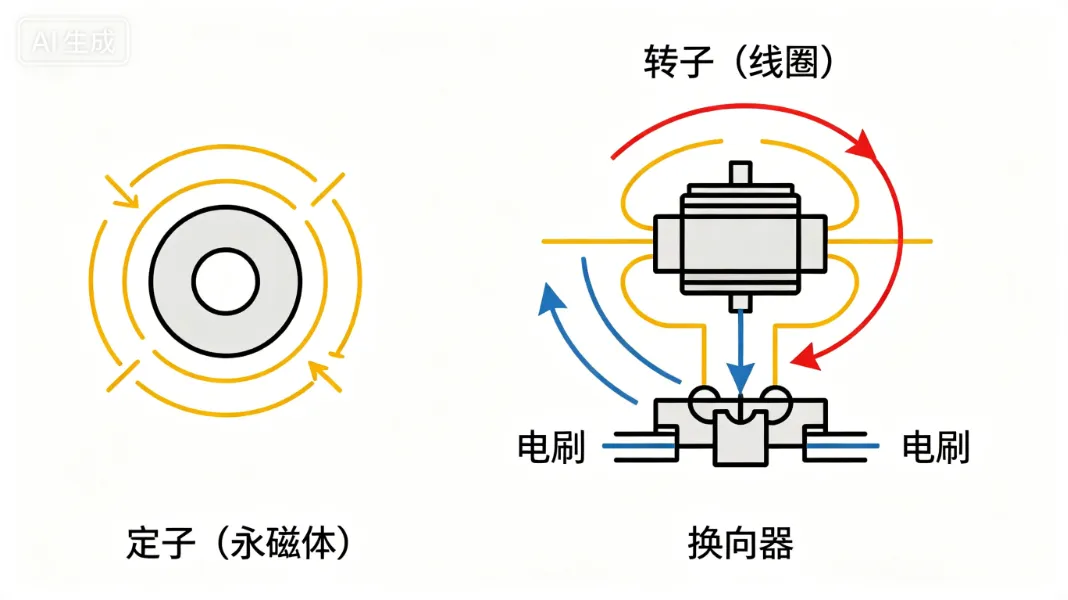
(1) DC brushed motor: the "main force" of toys and small fans
DC brushed motor is the most basic and common motor. When we were children, we used it for remote control cars, small fans at home, and electric toothbrushes. Its structure is so simple that it can be understood at a glance.
1. Core structure: The stator consists of two permanent magnets (N pole and S pole respectively) symmetrically installed on both sides; The rotor is composed of coils, commutators, and electric brushes. The coils are wound around the iron core, and the commutators and electric brushes are its "core features".
2. Working principle (dynamic restoration): After the power is turned on, the current is transmitted to the coil through the electric brush, and the coil instantly becomes an electromagnet with its own N and S poles; At this time, the permanent magnets of the stator and the electromagnets of the rotor generate a force of "repulsion of the same sex and attraction of the opposite sex", driving the coil to rotate half a turn; After the coil completes half a turn, the commutator will rotate along with the rotor, automatically switching the direction of the coil's current and causing the magnetic poles of the coil to reverse; The reversed coil will be attracted and repelled by the stator magnetic field, and continue to rotate half a turn. This cycle repeats, and the motor will continue to rotate.
3. One sentence memory: When the electric brush touches the commutator, change the polarity every half turn to ensure that the rotor always rotates in one direction.
4. Features and applications: The advantages are cheap, easy to control, and strong startup force; The disadvantage is that the electric brush will wear out, produce slight sparks during operation, and have a relatively short lifespan. In addition to toys, electric toothbrushes, and small fans, this type of motor is also commonly used in older electric vehicles.
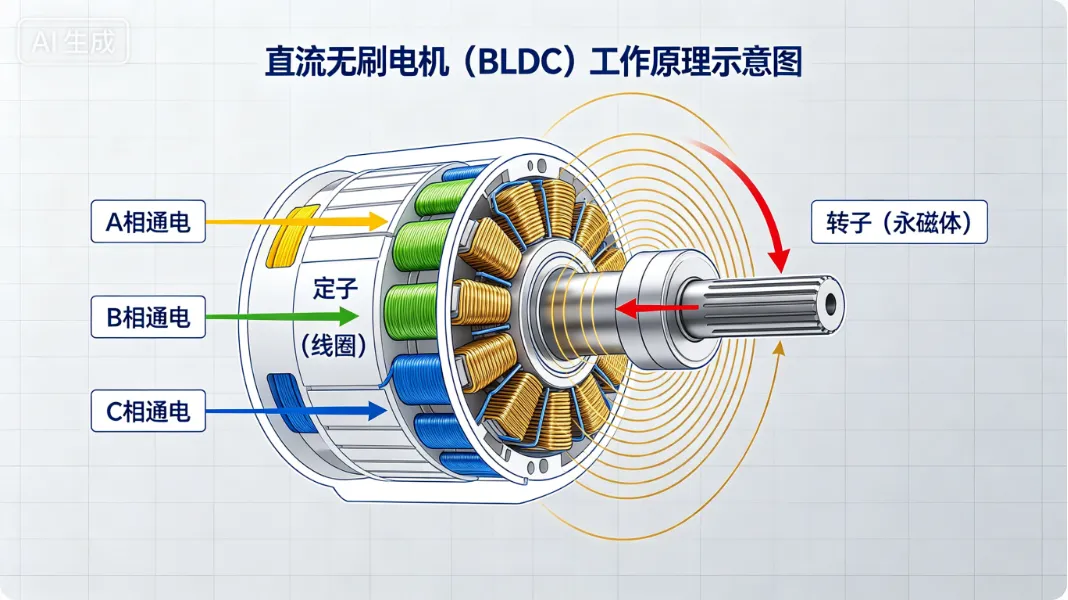
(2) DC brushless motor (BLDC): the "mainstream choice" for drones and electric vehicles
DC brushless motor is an upgraded version of DC brushed motor, which solves the problem of brush wear. It has now become the core motor of unmanned aerial vehicles, new energy electric vehicles, air conditioning fans and other equipment, and is also one of the most popular types of motors at present.
1. Core structure: It is exactly the opposite of a DC brushed motor - the stator consists of three sets of coils evenly distributed on the outer shell; The rotor is a permanent magnet attached to the motor shaft, without brushes or commutators.
2. Working principle (dynamic restoration): When the motor is working, the controller will energize three sets of stator coils in a fixed order, and the energized coils will generate a rotating magnetic field (like an invisible magnet spinning at a constant speed); The permanent magnet of the rotor will be "attracted and run" by this rotating magnetic field, and rotate together with the rotating magnetic field; At the same time, the sensors on the motor will detect the position of the rotor in real time and feed back the signal to the controller. The controller will then accurately switch the coil's energization sequence (i.e. commutation), so that the rotating magnetic field always leads the rotor slightly, continuously pulling the rotor to rotate without any "force shedding" situation.
3. One sentence memory: The coil is on the outside and the magnet is inside, and the electronic controller "precisely pulls the magnet to rotate", which is brushless and more durable.
4. Characteristics and Applications: The advantages are high efficiency, long lifespan, no sparks during operation, high speed, and low noise; The disadvantage is that it requires a matching electronic controller, which is slightly more expensive than DC brushed motors. Mainly used in devices such as drones, new energy electric vehicles, indoor air conditioning fans, computer hard drives and motors.
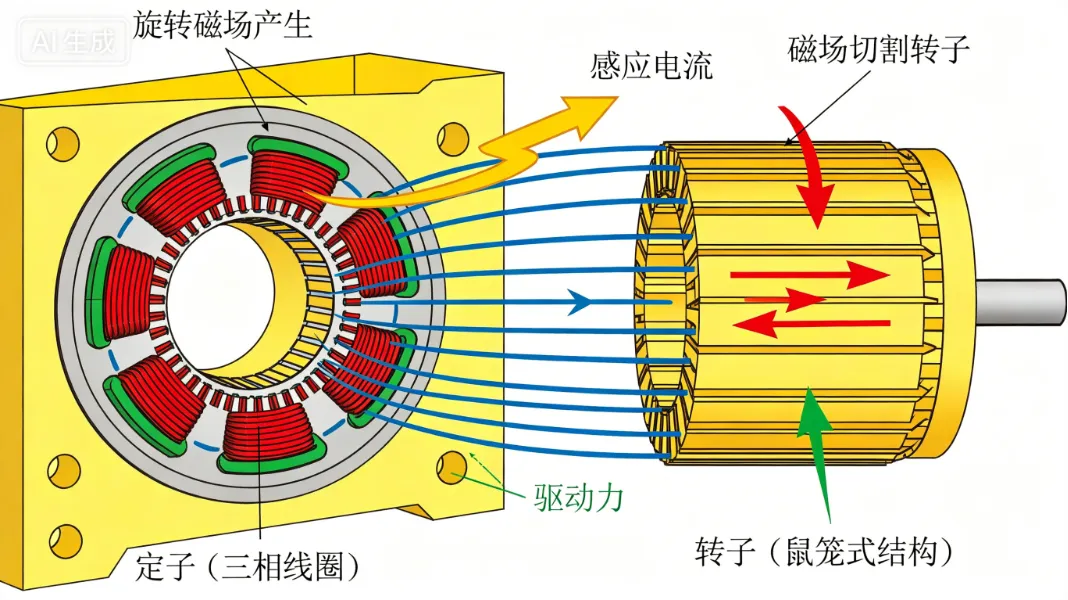
(3) Asynchronous Motor (Induction Motor): The "Overlord" of Industry and Home Appliances
Asynchronous motors are currently the most widely used motors worldwide, accounting for over 80% of all motors. They are used in factories for water pumps and fans, as well as in household air conditioning units, washing machines, refrigerators, and conveyor belts in shopping malls. Its characteristics are "simplicity, durability, and affordability", making it the "king of cost-effectiveness" in the motor industry.
1. Core structure: The stator consists of three sets of coils, which are powered by three-phase alternating current; The rotor is made of "squirrel cage" aluminum or copper bars, which short circuit with each other to form a closed circuit. The structure is minimalist and has almost no vulnerable parts.
2. Working principle (dynamic restoration): When three-phase AC power is applied to the three coils of the stator, due to the phase difference of 120 ° between the three-phase AC power, a uniformly rotating magnetic field will be generated inside the stator (like an invisible large magnet rapidly rotating); This rotating magnetic field will cut the aluminum bars on the rotor, and according to the principle of electromagnetic induction, current will be induced in the aluminum bars; Aluminum bars with current will experience Ampere force in a rotating magnetic field, driving the rotor to rotate with the rotating magnetic field; But the speed of the rotor will always be slightly slower than the speed of the rotating magnetic field (unable to keep up with the speed of the magnetic field), so it is called an "asynchronous motor".
3. One sentence memory: The stator magnetic field rotates fast, while the rotor is "dragged away" and always slows down by half a beat, without the need for permanent magnets and relying solely on induction power generation.
4. Features and Applications: The advantages are minimalist structure, super durability, low price, maintenance free, and the ability to withstand large loads; The disadvantage is that speed regulation requires a matching frequency converter, and the torque at low speeds is average, which is not suitable for scenarios that require precise speed regulation. In addition to industrial equipment and household appliances, it is also widely used in large equipment such as ships and railways.
(4) Permanent magnet synchronous motor (PMSM): the "core power" of new energy vehicles and high-end equipment
Permanent magnet synchronous motor is currently one of the most efficient and high-performance motors, with the core advantages of high torque and efficiency. It is mainly used in equipment with extremely high performance requirements, such as new energy vehicles, industrial robots, high-end air conditioners, etc.
1. Core structure: The stator, like an AC asynchronous motor, consists of three sets of coils; The rotor is a strong permanent magnet (usually made of rare earth materials with extremely strong magnetic properties).
2. Working principle (dynamic restoration): The controller applies alternating current to the stator coil to generate a rotating magnetic field; The strong permanent magnet of the rotor will be firmly "attracted" by this rotating magnetic field and strictly rotate synchronously with the rotating magnetic field - the speed of the rotor is exactly the same as that of the rotating magnetic field, without any "difference", which is also the origin of "synchronization"; The controller will accurately control the magnitude and phase of the current in real time, thereby controlling the torque and speed of the motor, allowing the motor to maintain efficient operation under different working conditions.
3. One sentence memory: The rotor is a strong magnet, and the stator magnetic field "pulls the magnet to run synchronously", with the highest efficiency and strongest torque.
4. Characteristics and Applications: The advantages are the highest efficiency, high power density, extremely strong torque at low speeds, low noise, and precise speed regulation; The disadvantage is high cost (rare earth materials are expensive) and require complex controllers. Mainly used in new energy vehicle drive motors, industrial robots, servo systems, high-end central air conditioning and other equipment.
(5) Stepper motor: a "good hand" for precise positioning
The biggest difference between stepper motors and other motors is "precise positioning" - it does not rotate continuously, but rotates step by step, with a fixed angle for each step, suitable for scenarios that require precise control of position and angle.
1. Core structure: The stator consists of multiple sets of coils (usually 8 poles) evenly distributed; The rotor is a toothed iron core, and some also use permanent magnets. The teeth of the rotor correspond one-to-one with the coil positions of the stator.
2. Working principle (dynamic restoration): The controller applies power to each coil of the stator in a fixed sequence; Every time a coil is energized, it generates a magnetic field, which attracts the teeth of the rotor to the aligned position and rotates a fixed angle (commonly 1.8 °/step); Every time power is applied, the rotor takes one step, and by controlling the number and frequency of power applications, the rotation angle and speed of the rotor can be precisely controlled; If there is no power, the rotor will be "locked" by the magnetic field and will not easily rotate (this is the "self-locking" function).
3. One sentence memory: once powered on, walk one grid, self-locking without turning, precise positioning without sensors.
4. Characteristics and Applications: The advantages are extremely accurate positioning, precise control of angle and position, high torque at low speeds, simple structure, and easy control; The disadvantage is that the performance is weak and the efficiency is low during high-speed operation, and there may be slight vibrations during operation. Mainly used in scenarios that require precise positioning, such as 3D printers, surveillance camera gimbals, printer paper feeding mechanisms, and small automation equipment.
(6) Servo motor: the "ceiling" of high-precision control
A servo motor is not an "independent type" of motor, but essentially a combination of "high-performance permanent magnet synchronous motor+encoder+driver". Its core advantage is "high-precision control", which can achieve precise adjustment of torque, speed, and position. It is the "core component" of industrial automation and high-end equipment.
1. Core structure: The foundation is a permanent magnet synchronous motor, plus two key components - an encoder and a driver. The encoder is responsible for real-time detection of the angle and speed of the rotor, and feeds back the detected signals to the driver; The driver adjusts the current of the stator coil at high speed based on the feedback signal, thereby accurately controlling the operation of the motor.
2. Working principle: Similar to permanent magnet synchronous motors, but with the addition of a "real-time feedback" link - the encoder transmits the position and speed information of the rotor to the driver in real time. The driver compares the "target position/speed" and "actual position/speed", continuously adjusts the current, and ensures that the operation of the motor always meets the set requirements, with an accuracy of "wire" level (1 wire=0.01 mm).
3. One sentence memory: the accuracy of stepper motors+the efficiency of DC brushless motors+real-time feedback, precise to the "silk" level.
4. Characteristics and Applications: The advantages are extremely high precision, precise control of torque and speed, fast response speed, and high efficiency and durability; The disadvantages are high cost and complex structure. Mainly used in industrial robots, CNC machine tools, automated production lines, high-end laser equipment and other scenarios that require extremely high precision.
3、 A table to distinguish all motors: A quick comparison guide for beginners
After reading the disassembly above, many people may still be confused about the differences between various types of motors. The following table summarizes the core characteristics, key parameters, and typical applications of the six major types of motors in the simplest language possible. It is easy to understand at a glance, making it convenient for everyone to quickly compare and remember:
|
Motor Type
|
Core Features
|
Do you have electric brushes?
|
Do you have permanent magnets?
|
Speed/torque
|
Typical Applications
|
|
DC brushed
|
Cheap, simple, easy to control, brush prone to wear and tear
|
有
|
Yes (stator is a permanent magnet)
|
Medium speed, medium torque
|
Toys, small fans, electric toothbrushes
|
|
brushless DC
|
Efficient, long-lasting, spark free, requiring a controller
|
无
|
Yes (the rotor is a permanent magnet)
|
High speed, high torque
|
Drones, electric vehicles, air conditioning fans
|
|
Asynchronous communication
|
Minimally durable, super cheap, maintenance free
|
无
|
None (relying entirely on sensing)
|
Medium speed, general torque
|
Water pump, fan, washing machine, refrigerator
|
|
Permanent Magnet Synchronous
|
The highest efficiency, strong torque, and high cost
|
无
|
Yes (the rotor is a rare earth permanent magnet)
|
Wide speed, strong torque
|
New energy vehicles, industrial robots
|
|
step
|
Accurate positioning, self-locking, weak high-speed performance
|
无
|
Optional (rotor can be permanent magnet/iron core)
|
Low speed, high torque
|
3D printer, monitoring gimbal
|
|
servo
|
High precision, real-time feedback, complex structure
|
无
|
Yes (the rotor is a permanent magnet)
|
Wide speed, precise torque
|
Industrial robots, CNC machine tools
|
4、 Summary for beginners: 3 sentences to understand the principle of electric motors
By now, I believe everyone has a clear understanding of various types of motors. Finally, I will summarize in three sentences to help you consolidate the core knowledge points. After reading, you will remember:
The core logic of all motors is the same:Electromagnetism → Magnetic attraction and repulsion → Generating rotational forceThere are no complex mysteries;
The difference between various types of motors lies only in four aspects:How is a magnetic field generated, is the magnet placed on the stator or rotor, is there a need for electric brushes, and is there real-time feedback;
3. The three most common types of motors in daily life:AC asynchronous motors (household appliances, industrial), DC brushless motors (digital, electric vehicles), DC brushed motors (toys, small devices)Remember these three types, they can basically cover most scenarios in life and work.
In fact, motors are not as complex as imagined. As long as we grasp the core of "electromagnetic generation and magnetic attraction and repulsion", and combine the structural characteristics of various motors, we can easily understand their working principles. If you want to experience the rotation process of the motor more intuitively, you can also watch it with a dynamic schematic diagram to quickly grasp the differences between various types of motors.